Architecture¶
The RP2040 PIO emulator has been designed to implement a client-server architecture.
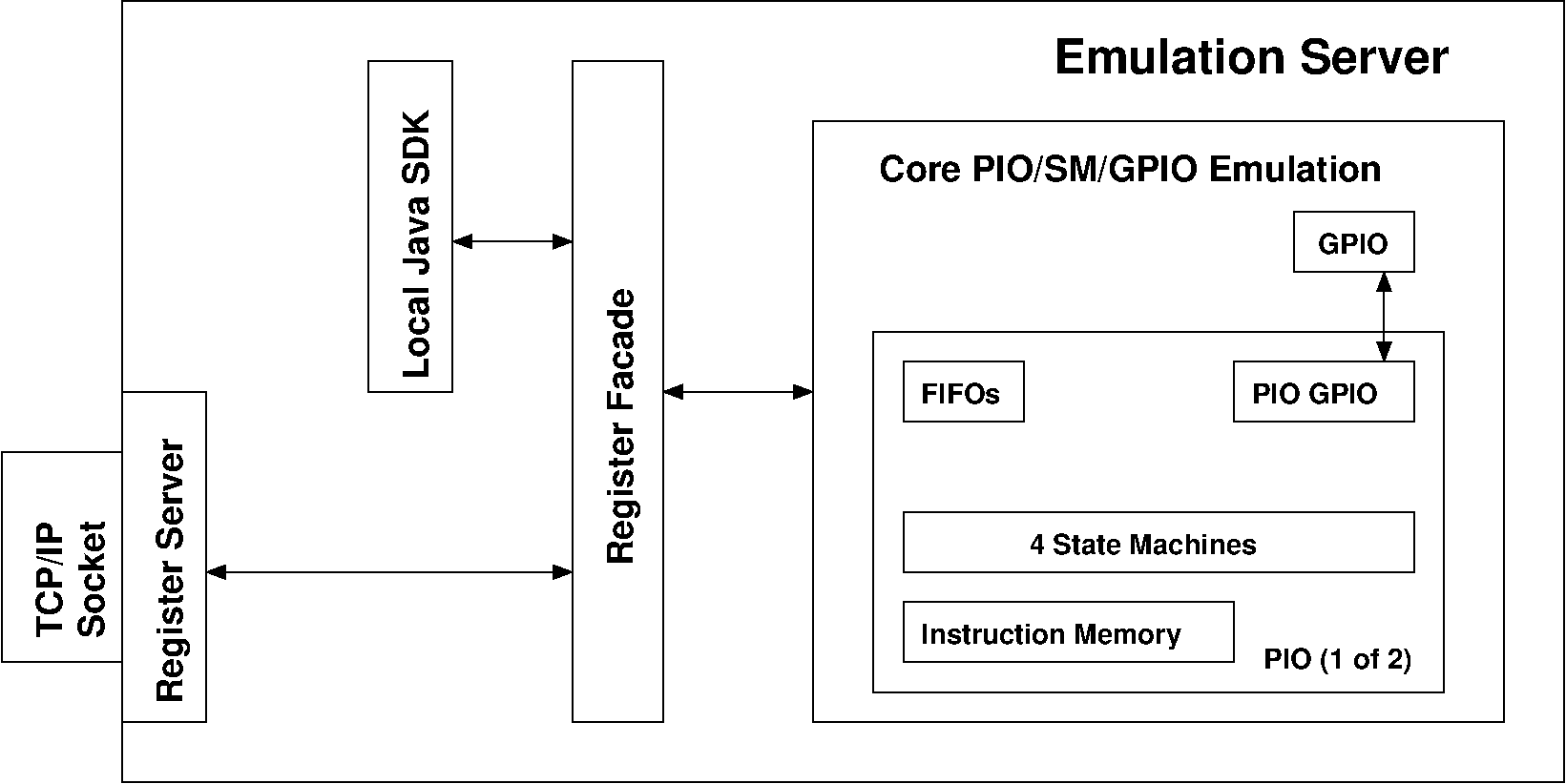
Emulation Server
Emulator Core¶
The core emulator consists of all parts that are relavant for emulating the complete PIO’s logic, including:
- four instances of a state machine, including its complete internal state,
- instruction fetch and decoding,
- instruction execution including flow control, I/O, branching, and register access,
- interfacing with GPIO, FIFO, and DMA,
- IRQ handling.
Emulator Timing¶
Emulation itself is based on a master clock thread with the notion of a virtual time called wallclock time (in contrast to the system time of the underlying operating system that the emulator runs on). Each clock cycle is subdivided into two phases 0 and 1:
- With the start of phase 0, the emulator performs instruction fetch & decode.
- With the start of phase 1, the emulator performs instruction execution.
If the emulator has performed all operations for the current phase, this phase is said to become stable. Until then, the phase is said to be in progress.
The emulator’s master clock can run in either realtime mode or in triggered mode.
- In realtime mode, there is a linear mapping of wallclock time onto system time, representing emulation speed and start time of an emulation run. The master clock runs autonomously in a thread of its own and continously invokes the emulator to alternately execute phase 0 and phase 1 in a loop. Whenever a phase has become stable (i.e. control flow returns back from the emulator to the master clock’s thread), then the master clock will wait until the wallclock time is behind the system time (according to the specified mapping). Only then, it will invoke the emulator for executing the next phase.
- In triggered mode, a client application explicitly triggers execution of the next phase, thus enabling a client to process in single-step mode when tracing a PIO program. It can do so only after the previous phase has become stable. Otherwise, the trigger will block until then.
For best stability of the overall emulation, client applications are advised to
- observe emulator state for visualization when phase 1 has become stable (i.e. immediately after instruction execution, such that changes are instantaneously displayed) and
- modify emulator state variables when phase 0 has become stable (i.e. immediately before instruction execution, such that modifications will immediately affect the emulation).

Master Clock Phases
Register Facade¶
The RP2040’s PIO hardware provides memory-mapped I/O as the main
concept for interfacing with the RP2040’s ARM cores. The emulator
takes up the idea of a memory interface, implementing it as a
register facade that provides an address-based interface for
accessing all of the emulator’s internal state by providing simple
read() and write() operations.
Java SDK¶
Similar to the Pico C SDK (but limited to those parts relevant for the PIO), the emulator provides a Java SDK that builds up on the register facade, just like the Pico C SDK builds up on read / write access of the PIO’s memory-mapped I/O.
Register Server¶
The register server is a TCP/IP based server that provides a very simple protocol for exporting the functionality of the register facade via a TCP/IP socket. It mostly consists of a command for reading a value from an emulator’s address-based register, writing to an emulator’s adress-based register, and just a view more helper functions.
Register Client¶
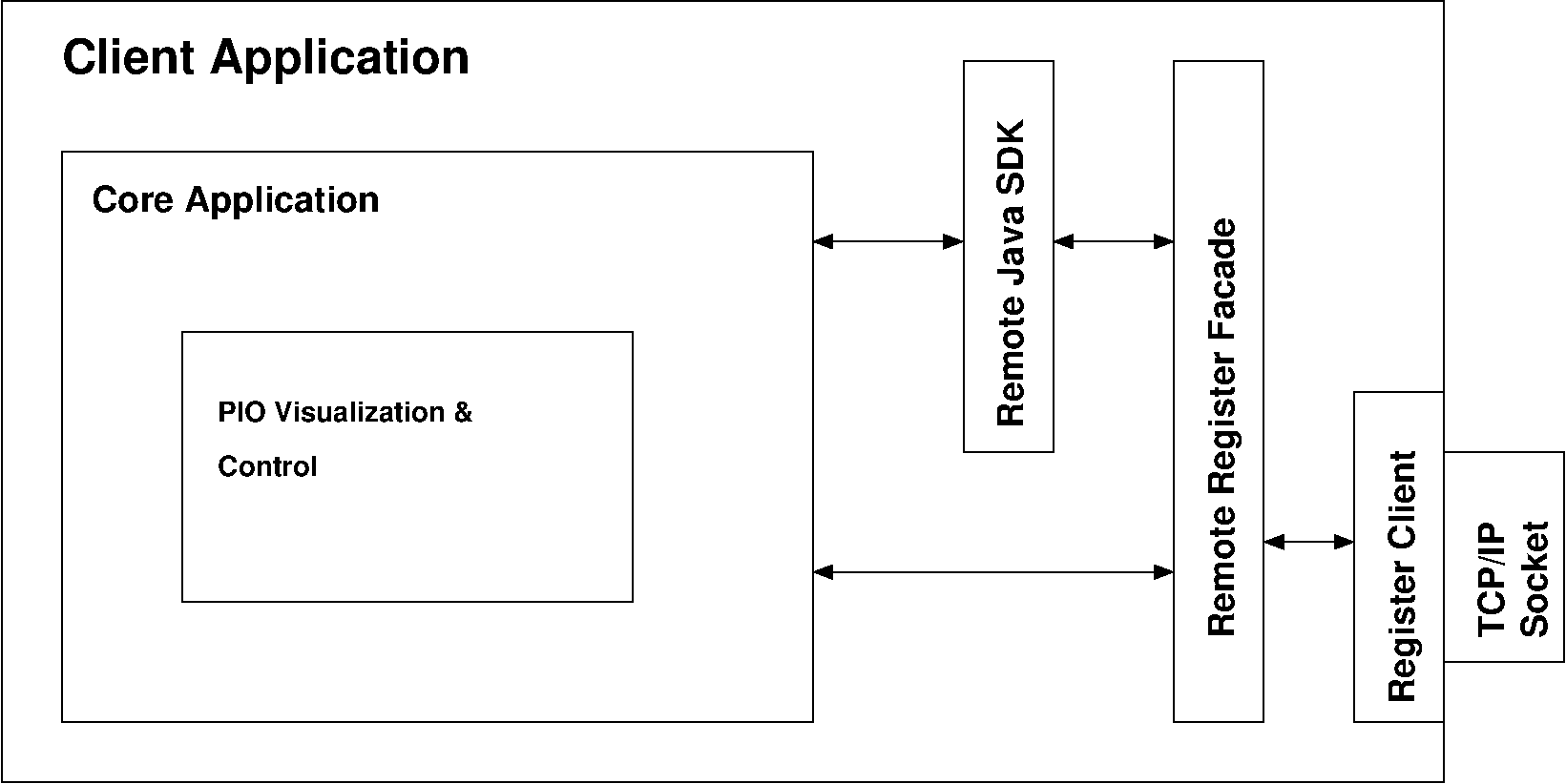
Client Application
The register client is just another implementation of the above register facade, that, however, does not directly communicate with a local emulator instance. Instead, the register client is connected to a register server, and forwards all calls to this client’s facade implementation to the remote register server’s backing register facade. In effect, the register client is the local stub implementation for the remote register facade behind the register server.
Remote Java SDK¶
Since our Java SDK solely builds upon the register facade, the SDK can be backed either by a local register facade, or by a remote register facade provided via the register client-server chain.
Client Applications¶
The client / server architecture provides a solid base for a sustainable ecosystem of client applications that create a pool of development tools that just has begun to grow and will eventually emerge into a fully grown environment for developing and debugging RP2040 PIO programs.
For client applications that build on the Java SDK (such as the Monitor, the TimingDiagram or the GPIO Oberserver application), there is no appearant difference between a local and a remote facade implementation. Instead, these applications may share access onto the same emulator instance, thus providing different and independent views onto the same emulation. Moreover, client applications can be written in virtually any language, since they communicate via TCP/IP with the emulation server rather than depending on a particular language binding.
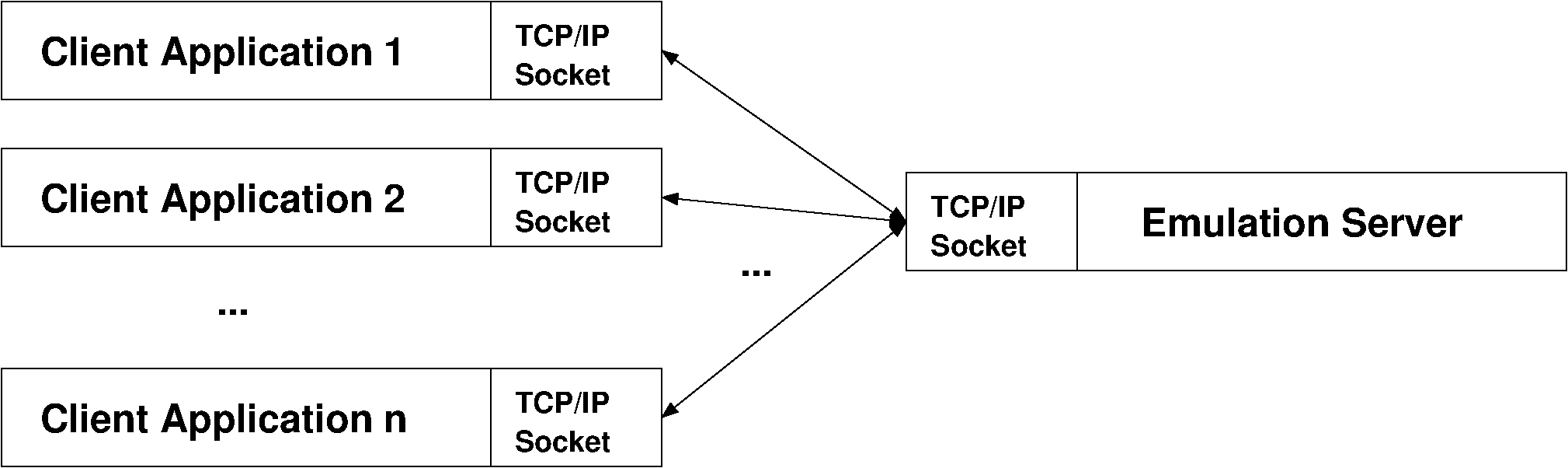
Client-Server Architecture